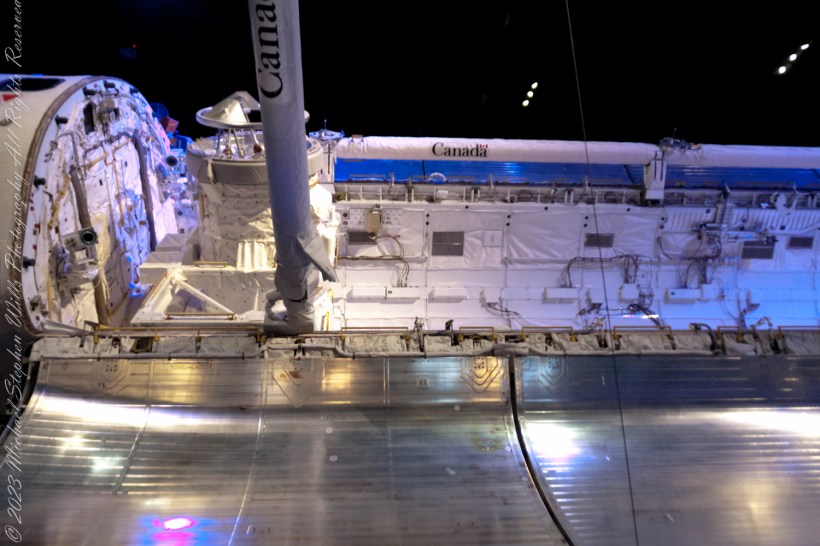
The Canadarm

The Canadarm, or Canadarm1, officially known as the Shuttle Remote Manipulator System (SRMS) and sometimes referred to as the SSRMS, represents a series of robotic arms utilized aboard the Space Shuttle orbiters. These arms were instrumental in deploying, manipulating, and retrieving payloads. Following the tragic Space Shuttle Columbia disaster, the use of Canadarm became invariably linked with the Orbiter Boom Sensor System (OBSS). The OBSS played a crucial role in examining the shuttle’s exterior for any damages to its thermal protection system, enhancing the safety of subsequent missions.
The genesis of Canada’s involvement in the Space Shuttle program dates back to 1969 when the National Aeronautics and Space Administration (NASA) extended an invitation to Canada. At the outset, the specifics of Canada’s role were unclear, though the need for a manipulator system was immediately recognized as vital. The Canadian firm DSMA ATCON had previously made strides in robotics with the development of a robot designed to load fuel into CANDU nuclear reactors, capturing NASA’s interest. By 1975, a formal agreement was reached between NASA and the Canadian National Research Council (NRC), under which Canada would undertake the development and construction of the Canadarm.
The NRC subsequently awarded the contract for the manipulator to Spar Aerospace (currently known as MDA), under which three distinct systems were to be developed: an engineering model to aid in design and testing, a qualification model for environmental testing to ensure the design’s suitability for space, and a flight unit destined for use in missions. This collaborative effort marked a significant milestone in the use of robotics in space exploration, showcasing international cooperation in advancing space technology.